Knowledge Share
^___^ ก่อนอื่นผมขอกล่าวสวัสดีกับทุกท่านที่แวะเข้ามาอ่านบทความนี้
บทความนี้ผมตั้งใจทำและได้ถูกคัดให้เข้าไปในงานการประชุมวิชาการระดับประเทศทางด้านเทคโนโลยีสารสนเทศ (National Conference on Information Technology หรือย่อๆว่า NCIT 2012 หัวข้อเป็นอย่างไรลองติดต่ออ่านกันด้านล่างครับ หวังว่าบทความนี้สามารถช่วยไม่มากก็น้อยกับทุกท่านครับ

หัวเรื่อง: การประยุกต์ใช้เทคโนโลยีความจริงเสริมเพื่อช่วยในการสอนเรื่องตัวอักษรภาษาอังกฤษ A-Z
1. บทคัดย่อ
2. บทนำ
3. ทฤษฎีที่เกี่ยวข้อง
4. การดำเนินงาน
5. ผลการดำเนินงาน
6. สรุปและอภิปรายผลการดำเนินงาน
7. เอกสารอ้างอิง
1. บทคัดย่อ
งานวิจัยนี้เป็นออกแบบและพัฒนาระบบเพื่อช่วยในการสอนเรื่องตัวอักษรภาษาอังกฤษ A-Z โดยใช้เทคโนโลยีความจริงเสริม (Augmented Reality :AR) ระบบนี้สามารถนำไปใช้เสริมการสอนเรื่องตัวอักษรภาษาอังกฤษ A-Z แก่นักเรียนในระดับเบื้องต้นได้ ซึ่งนอกจากเทคโนโลยีความจริงเสริมนี้จะถูกพัฒนาขึ้นโดยเครื่องมือที่ชื่อว่า FLARToolkit แล้ว ยังประกอบด้วยการสร้างโมเดล 3 มิติ เพื่อให้ระบบการสอนมีความน่าสนใจ เข้าใจง่ายและรวดเร็วกับการเรียนแบบโลกเสมือนจริง ผลการประเมินคุณภาพของระบบ โดยการใช้แบบสอบถามกับกลุ่มตัวอย่าง 2 กลุ่ม คือ ผู้เชี่ยวชาญจำนวน 10 ท่าน และผู้ใช้งานทั่วไปจำนวน 30 ท่าน พบว่าแบบประเมินคุณภาพของระบบสำหรับผู้เชี่ยวชาญได้ค่าเฉลี่ยเท่ากับ 4.40 ค่าส่วนเบี่ยงเบนมาตรฐานเท่ากับ 0.60 และผลการประเมินคุณภาพของระบบสำหรับผู้ใช้งานทั่วไปได้ค่าเฉลี่ยเท่ากับ 3.81 ค่าส่วนเบี่ยงเบนมาตรฐานเท่ากับ 0.84 สามารถสรุปได้ว่า ระบบที่ออกแบบและพัฒนาขึ้นมีคุณภาพอยู่ในระดับดี ดังนั้นจึงน่าจะสามารถนำไปใช้งานได้เป็นอย่างดี
คำสำคัญ-- ความจริงเสริม; ภาพเสมือนจริง; ตัวอักษรภาษาอังกฤษ
2. บทนำ
การเรียนการสอนในปัจจุบันยังคงให้ผู้เรียนศึกษาโดยใช้หนังสือเป็น ตัวนำเสนอ โดยรูปแบบการเรียนส่วนใหญ่มักจะเป็นการท่องจำตามทฤษฎีและรูปภาพประกอบที่เป็นภาพสองมิติในหนังสือ ซึ่งบางครั้งอุปกรณ์การเรียนเกิดชำรุดเสียหาย จะทำให้ผู้เรียนจินตนาการตามเนื้อหาได้ยาก เข้าใจผิด ส่งผลให้ผู้เรียนเกิดความเบื่อหน่ายและไม่มีความพยายามทำความเข้าใจในเนื้อหาของเรื่องที่เรียน แต่ถ้ามีการปรับปรุงรูปแบบการเรียนการสอนใหม่ โดยการนำภาพสามมิติเข้ามาช่วยในการแสดงภาพประกอบในเนื้อหา ทำให้ผู้เรียนมองเห็นภาพและสามารถจินตนาการตามเนื้อหาที่เรียนได้อย่างชัดเจนและถูกต้อง เกิดความกระตือรือร้นในการเรียนรู้ รวมทั้งสามารถทำความเข้าใจในเนื้อหาบทเรียนได้อย่างรวดเร็วยิ่งขึ้น นอกจากนี้ยังเกิดทัศนคติที่ดีต่อการเรียน พร้อมทั้งเกิดความต้องการที่จะเรียนเนื้อหาในบทเรียนต่อไปเรื่อย ๆ
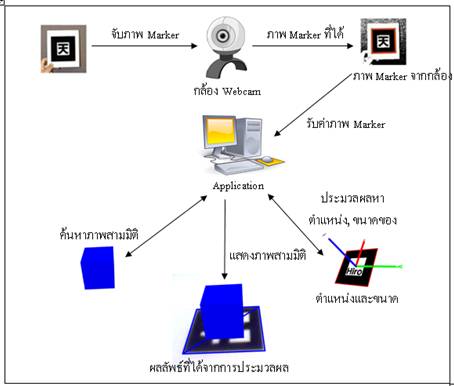
ซึ่งเทคโนโลยีความจริงเสริม หรือ AR ซึ่งย่อมาจากคำว่า Augmented Reality [1] เป็นเทคโนโลยีที่ผสานเอาโลกแห่งความเป็นจริง (Real) เข้ากับโลกเสมือน (Virtual) โดยผ่านทางอุปกรณ์ Webcam กล้องมือถือ คอมพิวเตอร์ รวมกับภาษาคอมพิวเตอร์ Action Script 3.0 และการใช้ซอฟต์แวร์ต่าง ๆ เช่น 3D MAX, Adobe Flash, Adobe Photoshop, Adobe Dreamweaver เป็นต้น ซึ่งจะทำให้ภาพที่เห็นในจอภาพจะเป็น ภาพ 3 มิติ เช่น คน สัตว์ สิ่งของ สัตว์ประหลาด ยานอวกาศ เป็นต้น ซึ่งมีมุมมองถึง 360 องศา สามารถหมุนได้รอบทิศทางทำให้ปรากฏเสมือนภาพจริงขึ้นมา
จากเหตุผลดังกล่าวนี้ผู้วิจัยจึงได้นำเทคนิคเอฟแอลเออาร์ทูคิทบนอินเทอร์เน็ตนี้ไปประยุกต์ใช้ในการพัฒนาระบบแบบหัดอ่านตัวอักษรภาษาอังกฤษเอถึงแซด ซึ่งเทคนิคนี้ทำให้ได้สื่อการเรียนการสอนที่น่าสนใจ เกิดความกระตือรือร้นในการเรียนรู้มากขึ้น ทำให้ผู้เรียนเกิดความรู้สึกสนุกสนานและตื่นตาตื่นใจกับการเรียนแบบโลกเสมือนจริง อีกทั้งไม่เกิดความเบื่อหน่ายเพราะผู้เรียนได้ร่วมสนุก นอกจากนี้แล้วสื่อการเรียนการสอนยังประกอบด้วยภาพ 3 มิติ เพื่อให้ผู้เรียนเกิดความเข้าใจได้ง่าย รวดเร็ว ถูกต้อง และมีมุมมองต่อการเรียนรู้ในรูปแบบใหม่เพิ่มขึ้น
3. ทฤษฎีที่เกี่ยวข้อง
3.1. Augmented Reality (AR)
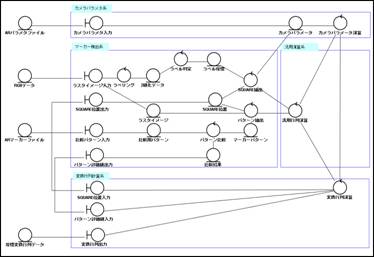
Augmented Reality หรือ AR เป็นเทคโนโลยีที่พัฒนาในรูปแบบ Human-Machine Interface ที่อาศัยเทคโนโลยีคอมพิวเตอร์ และระบบเสมือนจริง (Virtual Reality) โดยที่วัตถุเสมือนนั้น ๆ จะถูกสร้างมาผสมกับสภาพในโลกจริงในรูป 3D และแสดงผลแบบ Real Time โดยเทคโนโลยีนี้จะต้องประกอบด้วย 3 ระบบ คือ ระบบ Tracking ระบบแสดงภาระบบประมวลผลเพื่อสร้างวัตถุ 3D โดยระบบ Tracking (กล้อง) จะรับข้อมูลรูปภาพเข้าไป เช่น รูปแบบ ตำแหน่ง และทิศทาง จากนั้นระบบประมวลผลก็จะนำไปแปลความหมาย และแสดงภาพสามมิติออกมาในตำแหน่งและทิศทางเดียวกันกับภาพที่กล้องจับได้ [2] เทคโนโลยี AR สามารถแบ่งประเภทตามส่วนวิเคราะห์ภาพ (Image Analysis) ได้ออกเป็น 2 ประเภทด้วยกัน [3] ได้แก่ Marker based AR และ Marker-less Based AR โดย ที่ Marker based AR นั้น เป็นการวิเคราะห์ภาพโดยอาศัย Marker (วัตถุสัญลักษณ์) เป็นหลักในการทำงาน ส่วน Marker-less Based AR เป็นการวิเคราะห์ภาพที่ใช้คุณลักษณะต่าง ๆ ที่อยู่ในภาพ (Natural Features) มาทำการวิเคราะห์เพื่อคำนวณหาค่าตำแหน่งเชิง 3 มิติ (3D Pose) เพื่อนำไปใช้งานต่อไป ซึ่งขั้นตอนของ Marker based AR สามารถแบ่งได้เป็น 3 ขั้นตอน ได้แก่ Image Analysis, Pose Estimation และ 3D Graphic Rendering ซึ่งแสดงดังรูปที่ 1
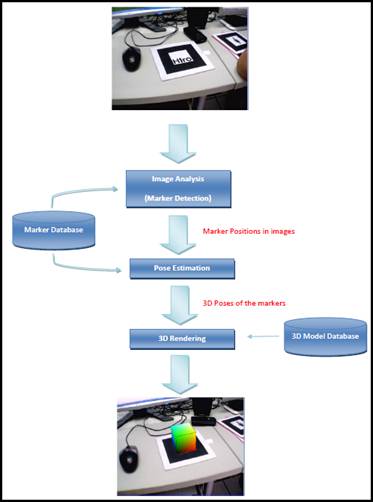
รูปที่ 1. แผนภาพการทำงานของเทคโนโลยี Augmented Reality
โดยรวมแล้วกระบวนการ Image Analysis และ Pose Estimation จะถูกเรียกรวมกันว่าการ Visual Tracking เนื่องจากในงานวิจัยนี้ผู้วิจัยได้เลือกศึกษาเครื่องมือที่เป็นที่รู้จักกันอย่างกว้างขวางในแวดวงของเทคโนโลยี Augmented Reality กล่าวคือ FLARToolKit [4], [5] ดังนั้นแล้วเนื้อหาในส่วนของกระบวนการ Image Analysis และ Pose Estimation จึงอธิบายโดยยึดหลักของ FLARToolKit เป็นพื้นฐาน
3.2. Pose Estimation
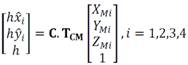
Pose Estimation เป็นขั้นตอนของการคำนวณค่าตำแหน่งเชิง 3 มิติ (3D Pose) ของ Marker เมื่อเทียบกับกล้องวีดีโอ ค่านี้จะถูกแสดงในรูปเมตริกซ์ขนาด 4 x 4 (TCM) ที่ระบุความสัมพันธ์ระหว่าง Camera Coordinated Frame และ Marker Coordinated Frame แสดงดังสมการที่ (1)
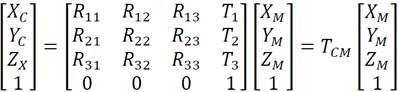 (1)
(1)
ซึ่ง Camera Coordinated Frame ก็คือ Coordinated Frame ที่ใช้อ้างอิงตำแหน่งใด ๆ ของกล้องวีดีโอ และ Marker Coordinated Frame ก็คือ Coordinated Frame ที่ใช้อ้างอิงตำแหน่งใด ๆ ของ Marker ซึ่งสามารถแสดงดังรูปที่ 2
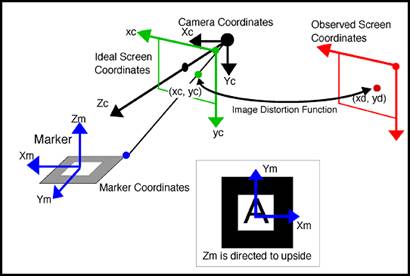
รูปที่ 2. ความสัมพันธ์ระหว่าง Camera Coordinated Frame
และ Marker Coordinated Frame
จากรูปที่ 2 ความสัมพันธ์ระหว่างจุดใดๆ (Xc Yc Zc ) บนCamera Coordinated Frame กับจุดที่ตรงกัน ( ) ใน Ideal Screen Coordinated Frame เป็นไปตาม Perspective Projection แสดงดังสมการที่ (2)
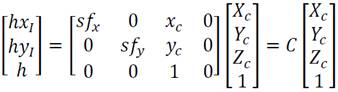 (2)
(2)
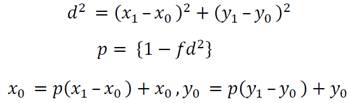
โดยที่ C ซึ่งเป็นเมตริกซ์ขนาด 3x4 ซึ่งประกอบไปด้วยค่า s, Fx, Fy, Xc, Yc โดยทั่วไปค่าเหล่านี้รวมกันเรียกว่า Camera Parameters ซึ่งจะคำนวณได้มาจากขั้นตอน Camera Calibration [6] ส่วนค่าความสัมพันธ์ระหว่างจุดใด ๆ บน Ideal Screen Coordinated Frame (X1 Y1) กับ Observe Screen Coordinated Frame (X0 Y0) ซึ่งเป็นจุดที่เราเห็นจริง ๆ ในภาพ สามารถแสดงดังรูปที่ 3 และสามารถอธิบายได้แสดงดังสมการที่ (3)
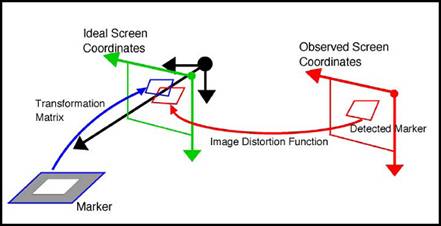
รูปที่ 3. ความสัมพันธ์ระหว่าง Ideal Screen Coordinates
และ Observe Screen Coordinates
 (3)
(3)
โดยที่ X0 Y0 คือจุดศูนย์กลางของการ Distortion (Center Coordinates of Distortion) และ f คือ Distortion Factor ซึ่งค่าทั้ง 2 จะได้มาจากกระบวนการ Camera Calibration
รูปที่ 4. กระบวนการคำนวณค่า 3D Poses
จากรูปที่ 4 จะแสดงกระบวนการที่จะได้มาของค่า TCM เมื่อเรารู้ค่าตำแหน่งของ Marker ทั้ง 4 จุดบน Observed Screen Coordinates ในภาพที่ถ่ายจากกล้องวีดีโอ ซึ่งกล่าวโดยเฉพาะค่านี้สามารถหาได้จากการคำนวณหาคำตอบของฟังก์ชั่นค่าผิดพลาด (Error Function) แสดงดังสมการที่ (4) ซึ่งโดยทั่วไปแล้วเราจะใช้เทคนิคทางด้านการหาค่าที่เหมาะสม (Optimization) ซึ่งเป็นกระบวนแบบ Iterative
![]() (4)
(4)
โดยที่ ![]()
![]() แสดงได้โดย
แสดงได้โดย
 (5)
(5)
3.3. 3D rendering
3D rendering เป็นส่วนสุดท้ายที่จะทำให้กระบวนการ AR ครบถ้วนสมบูรณ์ ซึ่งก็คือ การเพิ่ม (Augment) ข้อมูลที่เราต้องการซึ่งโดยทั่วไปแล้วจะเป็นโมเดล 3 มิติ (3D Model) ลงไปในภาพที่ได้จากกล้องวีดีโอ ณ ตำแหน่งของ Marker ที่ตรวจพบจากขั้นตอน Image Analysis โดยใช้ค่าตำแหน่งเชิง 3 มิติที่คำนวณได้จากขั้นตอน Pose Estimation กล่าวโดยทั่วไปแล้ว 3D Rendering หมายถึง กระบวนการที่ทำการสร้างภาพ 2 มิติ จากโมเดล 3 มิติ ซึ่งโมเดล 3 มิตินี้ จะอธิบายวัตถุหรือสิ่งแวดล้อมหนึ่ง ๆ ที่เราจะต้องการสร้างภาพนั้น เนื่องจากเทคนิคทางด้าน 3D Rendering นั้นมีหลากหลาย แต่ในโครงงานนี้เราเลือกศึกษาเทคนิค 3D Rendering โดยใช้หลักการ Scene Graph (โดยเลือกตามเครื่องมือที่เราจะใช้ซึ่งคือ Open Scene Graph) [3] ดังนั้นจึงขออธิบายหลักการโดยคร่าว ๆ ของ Scene Graph
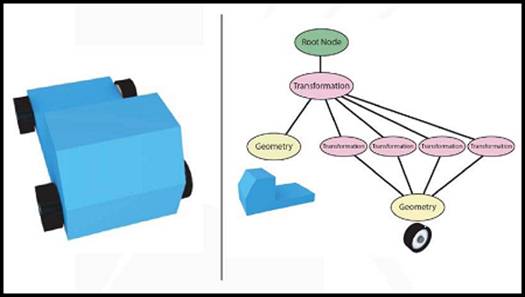
รูปที่ 5. กระบวนการคำนวณค่า 3D Poses
จากภาพที่ 5 จะเห็นได้ว่ามีอยู่สองส่วนด้วยกัน ส่วนทางซ้ายคือ ส่วนของโมเดล 3 มิติ ที่ได้รับการ Render หรือ การแสดงออกมาเป็นภาพเรียบร้อยแล้ว ส่วนทางขวาก็คือ โครงสร้างของ Scene Graph ซึ่งเป็น Tree-like structure ซึ่งเมื่อ Render ตาม Tree นี้แล้วก็จะได้โมเดล 3 มิติตามที่ปรากฏในส่วนทางซ้ายออกมา เมื่อพิจารณากันที่ตัว Tree ที่อยู่ทางขวา ดังนี้ วิธีการแวะผ่านต้นไม้ (Tree Traversal) แบบ “การแวะผ่านแบบก่อนลำดับ” (Preorder Traversal) ก็จะสามารถอธิบายเป็น Node โดยเริ่มจาก Root Node ได้
Root Node คือส่วนบนสุดของต้นไม้ โดยที่การแวะผ่านต้นไม้ จะต้องเริ่มแวะที่ Root Node ก่อนเสมอ ซึ่ง Root Node นี้จะมี Child Node หรือไม่มีก็ได้ แต่ถ้าหากไม่มี Child Node นั่นหมายถึงต้นไม้นี้จะไม่มีการแสดงภาพหรือโมเดลใด ๆ ออกสู่หน้าจอ
การแปลงค่า (Transformation) Node นี้จะเป็น Node ที่เก็บ Matrix ขนาด 4 x 4 ที่ได้จากขั้นตอน Pose estimation เอาไว้ โดยที่กล่าวได้คร่าว ๆ ว่า Node นี้ จะเป็น Node ที่เก็บค่าสำหรับการระบุตำแหน่งที่ต้องการแสดงภาพในส่วนต่าง ๆ ลงในหน้าจอ โดยใช้ Matrix ดังกล่าวนี้ เพื่อเป็นตัวแปลง พิกัดในเชิง 3 มิติของ Camera หรือ Viewer เพื่อให้อยู่ในรูปของ พิกัดในเชิง 3 มิติของ Object หรือ โมเดล 3 มิติ ที่ต้องการแสดงลงไปในหน้าจอ
3.4. FLARToolKit (Flash Augmented Reality ToolKit)
FLARToolKit (Flash Augmented Reality ToolKit) [5] คือ เครื่องมือที่ประกอบด้วยฟังก์ชั่นต่าง ๆ ที่จำเป็นต้องใช้ในการพัฒนาโปรแกรมในด้านเทคโนโลยี AR นอกจากนี้แล้วยังโดยประกอบด้วย Library ที่สามารถรองรับได้หลากหลายแพลตฟอร์ม และพยายามลดข้อแตกต่างของ Library เพื่อให้ ง่ายต่อการนำไปประยุกต์ใช้ในแพลตฟอร์มที่แตกต่างกันและมีประสิทธิภาพ FLARToolKit ใช้ PaperVision3d ช่วยในการแสดงผลพร้อมทั้งจัดการกับอุปกรณ์ และ Library กล้องวิดีโอ สามารถแสดงดังรูปที่ 6
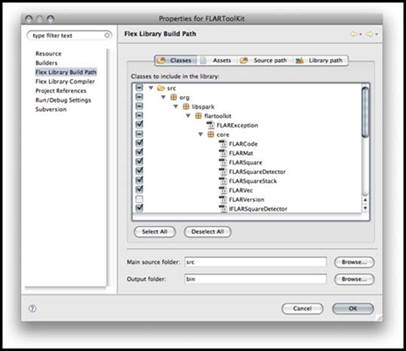
รูปที่ 6. FLARToolKit
หรืออีกความหมายหนึ่งว่าเป็นการจำลองของภาพเสมือนคอมพิวเตอร์กราฟิกโดยแสดงผลผ่าน Browser ซึ่งจะใช้ Webcam เป็นตัวจับภาพเครื่องหมาย (Marker) และมีศักยภาพในการใช้งานอุตสาหกรรมและการศึกษาวิจัย FLARTooKit เป็นรุ่นที่ใช้ AS3 (Action Script 3) แต่ไม่ได้พัฒนาและประยุกษ์มาจากภาษา C แต่พัฒนาและประยุกษ์มาจาก JAVA ที่เรียกว่า NyARToolKit (ซึ่ง NyARToolKit จะทำงานรวดเร็วกว่า C) สามารถแสดงดังรูปที่ 7
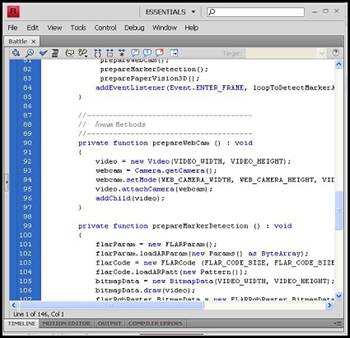
รูปที่ 7. Code FLARToolKit
3.5. PaperVision3d
PaperVision3d คือ โปรแกรมที่ช่วยสร้างวัตถุสามมิติ มีความเหมาะสมสำหรับใช้งานใน FLASH Action script 3.0 สามารถดาวน์โหลดโปรแกรมได้ที่เว็บ www.papervision3d.org แสดงดังรูปที่ 8
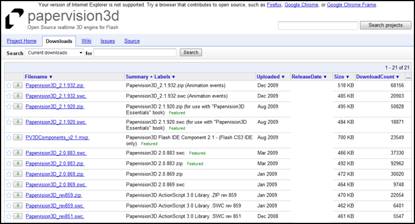
รูปที่ 8. Source Code หน้าเว็บ Papervision3d
3.6. NyARToolKit
NyARToolKit มีหน้าที่ในการตรวจสอบเครื่องหมายสัญลักษณ์ (Marker) และรับค่ากล้อง Webcam แต่ไม่ได้มีหน้าที่ในการจับภาพวิดีโอและการแสดงผล 3 มิติ ซึ่งถูกพัฒนาขึ้นมาหลากหลายแพลตฟอร์ม เช่น JAVA, FLARToolKit, Android, C#, C++ และ Silverlight โดยโครงสร้างการคิดและพัฒนาของ NyARToolKit สามารถแสดงดังรูปที่ 9
ภาพที่ 9. โครงสร้าง NyARToolKit
4. การดำเนินงาน
4.1. การศึกษาและเก็บรวบรวมข้อมูล
การศึกษาและรวบรวมข้อมูลทำการแบ่งการศึกษาออกเป็น 3 ส่วนคือ ส่วนของการศึกษาปัญหาและวิเคราะห์ความต้องการของระบบ ส่วนของการศึกษาขั้นตอนการพัฒนาระบบ และการศึกษาเครื่องมือต่าง ๆ ที่ใช้ในการพัฒนาระบบ
4.2. วิเคราะห์ระบบ
เมื่อได้ศึกษาระบบงานและเก็บรวบรวมข้อมูล ผู้วิจัยจึงได้นำ FLARToolKit มาใช้เป็นแนวทางในการวิเคราะห์และออกแบบและพัฒนาระบบ เพื่อนำไปเป็นประโยชน์ในด้านการประยุกต์ใช้เทคโนโลยีความจริงเสริมบนเว็บ เพื่อสอนเรื่องตัวอักษรภาษาอังกฤษต่อไป โดยได้ทำการวิเคราะห์ระบบ ซึ่งประกอบด้วยส่วนสำคัญดังต่อไปนี้
รูปที่ 10. ภาพรวมของระบบ FLARToolKit
4.2.1. ขั้นตอนการทำงานของเทคโนโลยี FLARToolKit [3] มีดังนี้
ก) ทำการแปลงภาพที่ได้มาจากกล้องวีดีโอที่เป็นภาพสีนั้น แปลงให้กลายเป็นภาพ 2 ระดับหรือ Binary Image โดยการกำหนดให้แต่ละพิกเซลในภาพ 2 ระดับมีค่าเป็น 0 หรือ 1 โดยที่จะมีค่าเป็น 0 เมื่อค่าระดับความสว่าง (Intensity) ของพิกเซลนั้นมีต่ำกว่าค่า Threshold มิฉะนั้นแล้วจะมีค่าเป็น 1
ข) ทำการหาพื้นที่ติดต่อกัน (Connected Components) โดยใช้เทคนิคทางการวิเคราะห์ภาพที่เรียกว่า Connected Component Labeling [7]
ค) หลังจากนั้นระบบจะทำการหาเส้นรอบรูป (Contours) ของพื้นที่ ที่ได้มาจากผลลัพธ์ในขั้นตอนที่แล้ว
ง) จากผลลัพธ์ของขั้นตอนที่แล้ว ระบบจะทำการประมาณหาค่าพารามิเตอร์ของสมการเส้นตรงที่แทนเส้นรอบรูปซึ่งเป็นรูปสี่เหลี่ยมทั้ง 4 เส้น หลังจากนั้นระบบจะหาจุดมุม (Corners) ทั้งสี่จุดของภาพสัญลักษ์ (Marker) จากจุดตัดของเส้นตรงทั้งสี่ที่หาได้ ซึ่งจุดมุม 4 จุดนี้จะถูกนำไปใช้ในขั้นตอนกระบวนการ Pose Estimation
จ) Pose Estimation เป็นขั้นตอนของการคำนวณค่าตำแหน่งเชิง 3 มิติ (3D Pose) ของภาพสัญลักษณ์ (Marker) เมื่อเทียบกับกล้องวีดีโอ ค่านี้จะถูกแสดงในรูปเมตริกซ์ขนาด 4x4 (TCM) ที่ระบุความสัมพันธ์ระหว่าง Camera Coordinated Frame และ Marker Coordinated Frame
ฉ) 3D rendering ส่วนนี้เป็นส่วนสุดท้ายของระบบ ที่จะทำให้กระบวนการ Augmented Reality ครบถ้วนสมบูรณ์ ซึ่งก็คือ การเพิ่ม (Augment) ข้อมูลที่ต้องการซึ่งโดยทั่วไปแล้วจะเป็นโมเดล 3 มิติ (3D Model) ลงไปในภาพที่ได้จากกล้องวิดีโอ ณ ตำแหน่งของภาพสัญลักษ์ (Marker) ที่ตรวจพบจากขั้นตอน Image Analysis โดยใช้ค่าตำแหน่งเชิง 3 มิติที่คำนวณได้จากขั้นตอน Pose Estimation
4.2.2. ผังงาน (Flowchart Diagram)
ผังงานประกอบไปด้วยขั้นตอนของระบบดังนี้ (แสดงดังรูปที่ 11)
4.2.2.1. เข้าสู่เว็บไซต์
4.2.2.2. เปิดกล้อง Webcam
4.2.2.3 ตรวจสอบว่าผู้ใช้งานได้เตรียมสัญลักษณ์ (Marker) เป็นที่เรียบร้อยแล้วหรือไม่ ถ้ายังไม่เรียบร้อยทำการดาวน์โหลดสัญลักษณ์ (Marker) ที่เตรียมไว้หน้าเว็บไซต์
4.2.2.4. ตรวจสอบว่าผู้ใช้งานได้ติดตั้ง Adobe Flash Player ในเครื่องคอมพิวเตอร์เป็นที่เรียบร้อยแล้วหรือไม่ ถ้ายังไม่เรียบร้อยทำการดาวน์โหลดไฟล์ Adobe Flash Player ที่เตรียมไว้หน้าเว็บไซต์
4.2.2.5. นำสัญลักษณ์ (Marker) ที่เตรียมไว้ ส่องกล้อง Webcam
4.2.2.6. ระบบทำการวิเคราะห์สัญลักษณ์ (Marker) ที่นำมาส่องกับกล้อง webcam ว่าตรงกับตัวอักษรภาษาอังกฤษเอถึงแซตตัวอะไร
4.2.2.7. ระบบทำการประมวลผลและทำการดึง Object 3มิติ ที่เตรียมไว้ในฐานข้อมูลขึ้นมาแสดงผลบนสัญลักษณ์ (Marker) ดังกล่าว
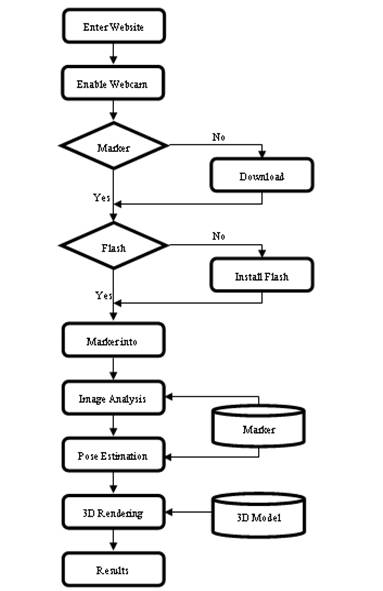
รูปที่ 11. ขั้นตอนการทำงานของระบบแบบหัดอ่านตัวอักษรภาษาอังกฤษเอถึงแซด
4.3. การพัฒนาระบบ
การพัฒนาระบบการประยุกต์ใช้เทคนิคเอฟแอลเออาร์ทูคิทบนอินเทอร์เน็ต กรณีศึกษาระบบแบบหัดอ่านตัวอักษรภาษาอังกฤษเอถึงแซด ได้จัดทำในลักษณะชองเว็บแอพพลิเคชั่นโดยแบ่งการใช้โปรแกรมดังนี้
4.3.1. โปรแกรม Adobe Dreamweaver ใช้ในการออกแบบและจัดการเว็บไซต์ โดยใช้ภาษา HTML
4.3.2. โปรแกรม Adobe Flash ใช้ในการจัดการเขียนภาษา Action Script 3
4.3.3. โปรแกรม Adobe Photoshop ใช้ในการออกแบบและสร้างภาพสัญลักษณ์ (Marker)
4.3.4. โปรแกรม MakerGenerator ใช้ในการแปลงไฟล์จาก *.jpg มาเป็น *.pat
4.3.5. โปรแกรม NyARToolKit ใช้ในการตรวจสอบเครื่องหมายสัญลักษณ์ (Marker) และรับค่ากล้อง Webcam
4.3.6. โปรแกรม PaperVision3d ใช้ในการช่วยสร้างวัตถุสามมิติ
4.3.7. โปรแกรม 3DMAX ใช้ในการพัฒนาโมเดล 3 มิติ และแปลงไฟล์จาก *.max มาเป็น *.dae
4.4. การประเมินผลของระบบ
4.4.1. การทดสอบระบบ
หลังจากที่ได้ทำการพัฒนาระบบเสร็จเรียบร้อยแล้ว การทดสอบและประเมินการทำงานของระบบที่พัฒนาขึ้นว่าสามารถใช้งานได้จริง ถูกต้อง แม่นยำ มีคุณภาพ และตรงตามความต้องการของผู้ใช้งานหรือไม่นั้น ผู้วิจัยจึงได้จัดทำการแบ่งการทดสอบแบ่งเป็น 2 ส่วน ได้แก่
4.4.1.1. การทดสอบระบบในขั้นแอลฟา (Alpha Stage)
การทดสอบระบบในขั้นแอลฟา (Alpha Stage) เป็นการทดสอบหาข้อบกพร่องของระบบโดยผู้วิจัย
4.4.1.2. การทดสอบระบบในขั้นเบต้า (Beta Stage)
เป็นการทดสอบหาคุณภาพของระบบ โดยผู้วิจัยให้กลุ่มตัวอย่างทั้ง 2 กลุ่มทดลองใช้ระบบ พร้อมทั้งตอบแบบประเมินคุณภาพของระบบ โดยได้แบ่งการทดสอบหาคุณภาพของระบบออกเป็น 4 ด้าน ดังนี้
ก) ด้านความสามารถของระบบทำการทดสอบระบบโดยทดลองใช้ระบบการประยุกต์ใช้เทคนิคเอฟแอลเออาร์ทูคิทบนอินเทอร์เน็ต กรณีศึกษาระบบแบบหัดอ่านตัวอักษรภาษาอังกฤษเอถึงแซด และนำแบบประเมินที่ได้ทำการออกแบบไว้นำไปใช้กับกลุ่มตัวอย่างจำนวน 3 กลุ่ม คือ ผู้เชี่ยวชาญจำนวน 10 ท่าน และผู้ใช้งานทั่วไปจำนวน 30 ท่าน รวมเป็นจำนวน 40 ท่าน เพื่อนำข้อมูลมาปรับปรุงแก้ไขระบบให้สมบูรณ์ยิ่งขึ้น
ข) ด้านความถูกต้องในการทำงานของระบบ
ค) ด้านลักษณะการใช้งานของระบบ
ง) ด้านประสิทธิภาพ
4.4.2. การประเมินระบบการประเมินระบบเป็นการจัดทำแบบประเมินคุณภาพของระบบโดยวัดจากความคิดเห็นของผู้ใช้งานระบบการประยุกต์ใช้เทคนิคเอฟแอลเออาร์ทูคิทบนอินเทอร์เน็ต กรณีศึกษาระบบแบบหัดอ่านตัวอักษรภาษาอังกฤษเอถึงแซด ผลที่ได้จากการทำแบบประเมินของผู้เชี่ยวชาญ และผู้ใช้ระบบ จะใช้หลักการทางสถิติเข้ามาช่วยในการสรุปผลการทดสอบประสิทธิภาพของระบบที่ได้พัฒนาขึ้น โดยการคำนวณหาค่าเฉลี่ยของการทดสอบในแต่ละด้าน เพื่อสรุปผลการประเมินว่าระบบที่ได้พัฒนามานี้มีคุณภาพในด้านต่าง ๆ อยู่ระดับใด ได้แบ่งรายละเอียดเกณฑ์ในการประเมิน ตามเกณฑ์ตามวิธีของไลเกิร์ต (Likert) แบ่งออกเป็น 5 ระดับ ได้แก่ ดีมาก ดี ปานกลาง พอใช้ และปรับปรุง
5. ผลการดำเนินงาน
หลังจากที่ได้พัฒนาการประยุกษ์ใช้เทคโนโลยีความจริงเสริมบนอินเทอร์เน็ตเพื่อช่วยสอนเรื่องตัวอักษรภาษาอังกฤษ A-Z ตามขั้นตอนต่าง ๆ ที่ได้วางแผนไว้ สามารถอธิบายผลจากการออกแบบและพัฒนาระบบได้ดังนี้
5.1. ส่วนแสดงผลของระบบ แบ่งเป็น
5.1.1. ส่วนหน้าหลัก
เป็นหน้าแรกในการแสดงผล ซึ่งประกอบไปด้วยส่วนแสดงข้อมูล เช่น ประกาศ ข่าว ขั้นตอนการใช้งาน แจ้งปัญหา เป็นต้น แสดงดังรูปที่ 12

รูปที่ 12. หน้าหลัก
5.1.2. ส่วนคู่มือใช้งาน
เป็นส่วนที่อธิบายรายละเอียดของระบบ เช่น FLARToolKit คืออะไร ขั้นตอนการทำงาน สิ่งต้องเตรียมพร้อมทั้งผู้ใช้งานและผู้พัฒนาระบบ ข้อดี ข้อเสีย แสดงดังรูปที่ 13

ภาพที่ 13. หน้าคู่มือการใช้งาน
5.1.3. ส่วนการสร้างรูปสัญลักษณ์ (Marker)
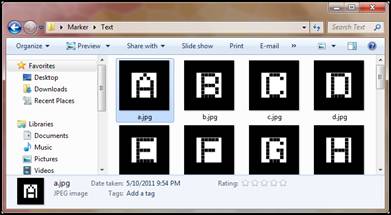
รูปที่ 14. รูปสัญลักษณ์ (Marker) เอถึงแซด
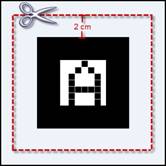
รูปที่ 15. การตัดกระดาษรูปสัญลักษณ์
5.1.4. นำสัญลักษณ์ (Marker) มาส่องกับกล้อง Webcam
โดยตัวอย่างในรูปนำสัญลักษณ์ตัวอักษรเอ มาส่องทำให้ปรากฎ Object 3 มิติ รูปแอปเปิ้ลขึ้นมาแสดงหน้าเว็บ แสดงดังรูปที่ 16 และ 17
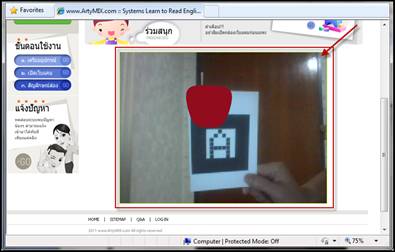
รูปที่ 16. สัญลักษณ์ (Marker) ตัวอักษรเอ แสดงปรากฎ Object 3 มิติ รูปแอปเปิ้ล
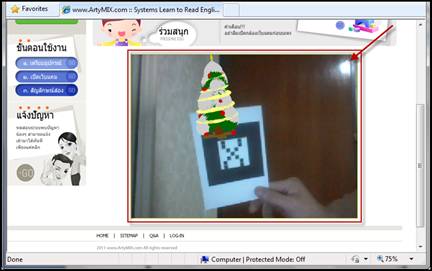
รูปที่ 17 สัญลักษณ์ (Marker) ตัวอักษรเอ็กซ์ แสดงปรากฎ Object 3 มิติ รูปต้นคริสมาส
5.2. ผลการประเมินของระบบ
ตาราง 1. ผลการประเมินโดยผู้เชี่ยวชาญ
| รายการประเมิน | ระดับคุณภาพ | ||
| S.D. | เชิงคุณภาพ | ||
| 1. ด้านความสามารถของระบบ | 4.37 | 0.61 | ดี |
| 2. ด้านความถูกต้องในการทำงานของระบบ | 4.53 | 0.53 | ดีมาก |
| 3. ด้านลักษณะการใช้งานของระบบ | 4.59 | 0.57 | ดีมาก |
| 4. ด้านประสิทธิภาพของระบบ | 4.10 | 0.68 | ดี |
| สรุปผลการประเมิน | 4.40 | 0.60 | ดี |
ตาราง 2. ผลการประเมินโดยผู้ใช้งานทั่วไป
| รายการประเมิน | ระดับคุณภาพ | ||
| S.D. | เชิงคุณภาพ | ||
| 1. ด้านความสามารถของระบบ | 3.76 | 0.91 | ดี |
| 2. ด้านความถูกต้องในการทำงานของระบบ | 4.23 | 0.93 | ดี |
| 3. ด้านลักษณะการใช้งานของระบบ | 3.89 | 0.84 | ดี |
| 4. ด้านประสิทธิภาพของระบบ | 3.37 | 0.68 | ปานกลาง |
| สรุปผลการประเมิน | 3.81 | 0.84 | ดี |
6. ผลการดำเนินงาน
6.1. สรุปผลการดำเนินงาน
การประยุกต์ใช้เทคโนโลยีความจริงเสริมบนอินเทอร์เน็ต เพื่อช่วยการสอนเรื่องตัวอักษรภาษาอังกฤษ A-Z จะเป็นอีกหนึ่งแนวทางให้อาจารย์สามารถนำไปประยุกต์ใช้กับการสอนการอ่านตัวอักษรภาษาอังกฤษในชั้นเรียน หรือนอกชั้นเรียนได้ เทคโนโลยี ความจริงเสริม จะทำได้สื่อการเรียนการสอนที่น่าสนใจ ทำให้ผู้เรียนเกิดความรู้สึกสนุกและตื่นตาตื่นใจกับการเรียนแบบโลกเสมือนจริง อีกทั้งไม่เกิดความเบื่อหน่าย นอกจากนี้แล้ว สื่อการเรียนการสอนยังประกอบด้วย Object 3 มิติ เพื่อให้ผู้เรียนเกิดความเข้าใจได้ง่ายและรวดเร็ว สำหรับขั้นตอนการพัฒนาระบบเป็นขั้นตอนการเขียนโปรแกรมซึ่งภาษาที่ใช้ในพัฒนาระบบคือ ภาษาแฟลช แอคชั่นสคริป 3.0 (AS3) ในส่วนของสัญลักษณ์ (Marker) ใช้โปรแกรม Adobe Photoshop CS5 ในส่วนของโมเดล 3 มิติและแปลงไฟล์จาก *.max เป็น *.dae ใช้โปรแกรม 3DMAX10 ในส่วนสร้างเว็บไซต์ใช้โปรแกรม Adobe Dreamweaver CS5 และในส่วนการแปลงไฟล์ *.jpg เป็น *.pat ใช้โปรแกรมออนไลน์ที่ http://flash.tarotaro.org/blog/2008/12/14/artoolkit-marker-generator-online-released/ ผู้วิจัยได้มีการทดลองใช้งาน และทดสอบคุณภาพของระบบโดยใช้แบบประเมินความคุณภาพ สอบถามความเห็นจากกลุ่มตัวอย่าง 2 กลุ่ม ได้แก่ กลุ่มผู้เชี่ยวชาญด้านคอมพิวเตอร์จำนวน 10 ท่าน และกลุ่มผู้ใช้งานทั่วไปจำนวน 30 ท่าน โดยผลจากการวิเคราะห์ข้อมูลการประเมินคุณภาพของระบบ พบว่าผู้เชี่ยวชาญประเมินคุณภาพของระบบอยู่ในระดับดี เนื่องจากระบบสามารถช่วยสอนให้เด็กนักเรียนหัดอ่านภาษาอังกฤษได้ดีขึ้น มีความน่าสนใจดึงดูดต่อการใช้งาน และสามารถใช้งานบนอินเทอร์เน็ตได้ ได้ค่าเฉลี่ยเท่ากับ 4.40 และค่าส่วนเบี่ยงเบนมาตรฐานเท่ากับ 0.60 ส่วนกลุ่มผู้ใช้ทั่วไปประเมินคุณภาพของระบบอยู่ในระดับดี เช่นกันโดยได้ค่าเฉลี่ยเท่ากับ 3.81 และค่าส่วนเบี่ยงเบนมาตรฐานเท่ากับ 0.84 ดังนั้น สามารถสรุปได้ว่าการประยุกต์ใช้เทคโนโลยีความจริงเสริมเพื่อช่วยสอนเรื่องตัวอักษรภาษาอังกฤษA-Z นี้ มีคุณภาพอยู่ในระดับที่ดี
6.2. อภิปรายผลการวิจัย
6.2.1. การประเมินด้านความสามารถของระบบ (Functional Requirement Test)
โดยประเมินจากกลุ่มผู้เชี่ยวชาญและกลุ่มผู้ใช้งานทั่วไป ซึ่งมีคุณภาพของระบบอยู่ในระดับดี ทั้งในด้านระบบสามารถช่วยสอนให้เด็กนักเรียนหัดอ่านภาษาอังกฤษได้ดีขึ้น ความสามารถของระบบมีความน่าสนใจ ดึงดูดต่อการใช้งาน สามารถใช้งานบนอินเทอร์เน็ตได้ เพิ่มความสะดวก ความสามารถของระบบในการแยกแยะตัวสัญลักษณ์ (Marker) ทำให้ระบบทำงานได้ในระดับดี
6.2.2. การประเมินคุณภาพด้านความถูกต้องในการทำงานของระบบ (Functional Test)
โดยประเมินจากกลุ่มผู้เชี่ยวชาญและกลุ่มผู้ใช้งานทั่วไป ซึ่งคุณภาพของระบบอยู่ในระดับดี ทั้งในด้านความถูกต้องในการแสดงโมเดลตรงกับสัญลักษณ์ (Marker) ความถูกต้องของลิ้งค์ที่เชื่อมโยงแต่ละหน้าเว็บไซต์ ความถูกต้องของไฟล์ดาวน์โหลดที่เตรียมไว้ในหน้าเว็บไซต์ และความถูกต้องของคู่มือการใช้งานที่เตรียมไว้ในหน้าเว็บไซต์ ซึ่งตรงตามรายละเอียดความต้องการของผู้เชี่ยวชาญและผู้ใช้งานตอนรวบรวมข้อมูลเพื่อออกแบบและพัฒนาระบบ
6.2.3. การประเมินคุณภาพในด้านลักษณะการใช้งานของระบบ (Usability Test)
โดยประเมินจากกลุ่มผู้เชี่ยวชาญและกลุ่มผู้ใช้งานทั่วไป ซึ่งมีผลอยู่ในระดับดี ทั้งในด้านการจัดวางข้อมูลและตำแหน่งบนหน้าจอคอมพิวเตอร์ การออกแบบหน้าจอระบบ ความเหมาะสมของขนาดตัวอักษรและการใช้สี ความสะดวกในการใช้งานระบบ ความน่าใช้งานของระบบ และปริมาณข้อมูลในการนำเสนอในแต่ละหน้าจอระบบได้เป็นอย่างดี
6.2.4. การประเมินคุณภาพของระบบในด้านประสิทธิภาพ (Performance Test)
โดยประเมินจากกลุ่มผู้เชี่ยวชาญและกลุ่มผู้ใช้งานทั่วไปอยู่ในระดับดี ทั้งในด้านความเร็วในการตอบสนองของระบบในภาพรวม ความเร็วในการประมวลผลของสัญลักษณ์ (Marker) ความเร็วในการแสดงผลจากการเชื่องโยงลิงค์แต่ละหน้าเว็บไซต์ ส่งผลให้ระบบมีประสิทธิภาพมีคุณภาพในระดับดี
6.3. ข้อเสนอแนะ
6.3.1. สัญลักษณ์ (Marker) ที่ใช้ควรทำไฟล์ pat (Marker Segment) ที่ไม่เกิด 16 x 16 จะช่วยในการแสดงผลได้เร็วขึ้น
6.3.2. แสงสว่าง ควรใช้แสงสว่างสีขาว หรืออยู่ที่แจ้ง ไม่ควรอยู่ในห้องที่แสงสว่างน้อยเกินไปจะช่วยให้แสดงผลได้ถูกต้อง
6.3.3. กระดาษที่ใช้พิมพ์สัญลักษณ์ (Marker) ควรใช้กระดาษถ่ายเอกสารทั่วไป สีขาว หรือเอากระดาษแข็งมาลองข้างหลัง จะช่วยให้ตอนทดสอบเพิ่มความสะดวกมากขึ้น ไม่โค้งหรือพับ
6.3.4. ขนาดโมเดล 3 มิติความทำให้ขนาดและความระเอียดต่ำ จะช่วยในการโหลดและแสดงผลได้รวดเร็วขึ้น
6.3.5. จำนวนสัญลักษณ์ (Marker) มีผลต่อการเปิดเข้าใช้งานครั้งแรก ในส่วนนี้ผู้พัฒนามีความเห็นว่าควรพัฒนาในส่วนของซอร์สโค๊ดให้ดีกว่านี้ จะช่วยทำให้ระบบทำงานได้เร็วขึ้น
6.3.6. ระบบแบบหัดอ่านตัวอักษรภาษาอังกฤษเอถึงแซด ควรมีการพัฒนาในด้านเสียง เพื่อให้ผู้ใช้งานเกิดความเพิ่มความเข้าใจและดึงดูดในการใช้งานมากยิ่งขึ้น
7. เอกสารอ้างอิง
[1] ธีระพงษ์ ท้าวหน่อ. Augmented Reality (AR). คณะศึกษาศาสตร์ สาขาสุขศึกษา, 2553. สืบค้นเมื่อวันที่ 23 พฤศจิกายน 2553 จาก http://api.ning.com/files/U3Qni9orn8oP2K4mA OaoNdOcCDES3btFqGI OuUc0rrhIKLnCkU2s6pG8xnAmwnj6oJt8sMsneYeO0oJ*yrHiAqB6AmuMLE5t/AugmentedRealit1.pdf
[2] วสันต์ เกียรติแสงทอง, พรรษพล พรหมมาศ และอนุวัตร เฉลิมสกุลกิจ. การศึกษาเทคโนโลยีออคเมนต์เตดเรียลริตี้ กรณีศึกษาพัฒนาเกมส์ “เมมการ์ด”. สาขาวิทยาการคอมพิวเตอร์ คณะวิทยาศาสตร์ มหาวิทยาลัย ศรีนครินทรวิโรฒ ปีการศึกษา, 2552. สืบค้นเมื่อวันที่ 23 พฤศจิกายน 2553 จาก http://facstaff.swu.ac.th/praditm/CP499_2552_AR.pdf
[3] P. Fua and V. Lepetit, “Vision Based 3D Tracking and Pose Estimation for Mixed Reality”, (pp.1-22) in Emerging Technologies of Augmented Reality Interface and Design (M. Haller, M.Billinghurst and B. H. Thomas), Idea Group Publishing, 2007.
[4] H. Kato, M. Billinghurst, Marker Tracking and HMD Calibration for a video-based Augmented Reality Conferencing System, In Proceedings of the 2nd International Workshop on Augmented Reality (IWAR 99).
[5] ARToolKit [online]. Available : http://www.hitl.washington.edu /ARToolKit, (As of Febuary 2010).
[6] Z. Zhang, A flexible new technique for camera calibration, IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(11) : 1330-1334, 2000.
[7] L. Shapiro and G. Stockman, Computer Vision, Prentice Hall, 2001